
[PCL] LiDAR 데이터 파싱하기
sensor_msgs::PointCloud로부터 라이다 데이터를 파싱해보자
개요
아래 사진에서 Num of fields에 보면 9라고 적혀 있는데, 라이다 포인트 클라우드 안에 9가지 속성이 있음을 알 수 있다.
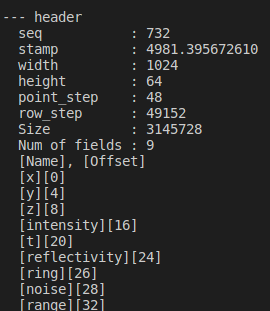
- x, y, z
- intensity
- t
- reflectivity
- ring
- noise
- range
거두절미하고 바로 파싱해보자
ROS 숙련자임을 가정하고 글을 작성한다
코드
sensor_msgs::PointCloud2 메세지가 수신되었을 때 헤더를 출력하고, data에 담겨있는 정보들을 파싱하는 코드다
ouster 회사의 라이다 기준으로 작성되었다.
void printAllCloudProperties(const sensor_msgs::PointCloud2::Ptr& msg)
{
std::cout << "\n\n--- header" << std::endl;
std::cout << " frame_id : " << msg->header.frame_id << std::endl;
std::cout << " seq : " << msg->header.seq << std::endl;
std::cout << " stamp : " << msg->header.stamp << std::endl;
std::cout << " width : " << msg->width << std::endl;
std::cout << " height : " << msg->height << std::endl;
std::cout << " point_step : " << msg->point_step << std::endl;
std::cout << " row_step : " << msg->row_step << std::endl;
std::cout << " Size : " << msg->row_step * msg->height << std::endl;
std::cout << " Num of fields : " << msg->fields.size() << std::endl;
int offset_x = 0;
int offset_y = 0;
int offset_z = 0;
int offset_intensity = 0;
int offset_t = 0;
int offset_reflectivity = 0;
int offset_ring = 0;
int offset_noise = 0;
int offset_range = 0;
std::cout << " [Name], [Offset]" << std::endl;
for(auto& field : msg->fields)
{
std::cout << " [" << field.name << "][" << field.offset << "]" << std::endl;
if (field.name == "x") offset_x = field.offset;
else if (field.name == "y") offset_y = field.offset;
else if (field.name == "z") offset_z = field.offset;
else if (field.name == "intensity") offset_intensity = field.offset;
else if (field.name == "t") offset_t = field.offset;
else if (field.name == "reflectivity") offset_reflectivity = field.offset;
else if (field.name == "ring") offset_ring = field.offset;
else if (field.name == "noise") offset_noise = field.offset;
else if (field.name == "range") offset_range = field.offset;
}
pcl::PointCloud<pcl::PointXYZI>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZI>());
cloud->header.frame_id = "os1_lidar";
cloud->points.reserve(msg->row_step);
int bytes_per_point = msg->point_step; // 48
for (int i = 0; i < msg->width * msg->height; i++)
{
pcl::PointXYZI new_point;
new_point.x = *(float*)(&msg->data[0] + bytes_per_point*i + offset_x);
new_point.y = *(float*)(&msg->data[0] + bytes_per_point*i + offset_y);
new_point.z = *(float*)(&msg->data[0] + bytes_per_point*i + offset_z);
new_point.intensity = *(float*)(&msg->data[0] + bytes_per_point*i + offset_intensity);
uint32_t point_t = *(uint32_t*)(&msg->data[0] + bytes_per_point*i + offset_t);
uint16_t point_reflectivity = *(uint16_t*)(&msg->data[0] + bytes_per_point*i + offset_reflectivity);
uint8_t point_ring = *(uint8_t*)(&msg->data[0] + bytes_per_point*i + offset_ring);
uint16_t point_noise = *(uint16_t*)(&msg->data[0] + bytes_per_point*i + offset_noise);
uint32_t point_range = *(uint32_t*)(&msg->data[0] + bytes_per_point*i + offset_range);
cloud->points.push_back(new_point);
}
}
Leave a comment