
[ROS/Python] 간단한 Subscriber
아주 간단한 ros subscriber 만들어보자!
바로 직전 포스트인 ros subscriber 이은 글이니 잘 동작하지 않으면 직전 포스트를 참고하자
Simple ROS Subscriber
1. 폴더 생성
파일을 만들 폴더를 하나 만들고 그 경로로 이동하자
$ mkdir ~/rospy_tutorial
$ cd ~/rospy_tutorial
2. Subscriber.py 파일 생성
Sublisher를 만들기 위하여 아래와 같이 파일을 만들어준다
$ gedit sub.py
3. 전체적인 코드
전체적인 코드를 보고 하나하나 나눠서 보자
In sub.py,
#! /usr/bin/env python
import rospy
from std_msgs.msg import String
def msg_callback(msg):
print(msg)
if __name__ == '__main__':
rospy.init_node('topic_sub_node')
sub = rospy.Subscriber('/bigbigpark', String, msg_callback, queue_size=1)
rospy.spin()
여기까지만 보고도 코드의 구조가 이해되는 사람은 바로 5번으로 넘어가자
4. 코드 나눠서 보기
저 문장을 셔뱅이라고 부르는데 자세한 설명은 여기를 참조하자
#! /usr/bin/env python
rospy 라이브러리를 불러온다
std_msgs라는 메세지 패키지에서 String이라는 헤더 파일을 불러온다
import rospy
from std_msgs.msg import String
callback은 다시 부른다? 이런 뉘앙스인데 말 그대로 특정 이벤트가 들어왔을 때 호출되는 함수 정도로만 알고 있자
함수의 뜻은 callback 함수가 호출되었을 때 수신된 메세지를 print하겠다는 뜻이다
def msg_callback(msg):
print(msg)
노드를 선언해준 후 Subscriber를 선언해준다
안에 들어가는 인자는 아래쪽에 나와있는 순서대로 토픽명, 타입, 콜백함수, 큐 사이즈 이다
다시 말해서 bigbigpark이라는 이름의 String 타입의 토픽을 subscribe하겠다는 것이고, 그 때 큐 사이즈는 1로 하겠다는 뜻이다
특히 토픽이 수신될 때마다 msg_callback이라는 콜백함수를 실행하겠다는 의미다
이 글에서는 queue_size에 대한 자세한 내용은 다루지 않겠다
rospy.init_node('topic_sub_node')
sub = rospy.Subscriber('/bigbigpark', String, msg_callback, queue_size=1)
rospy.spin()은 현재까지 선언된 모든 subscriber에 대한 callback 함수를 동작시키겠다는 의미다
이 부분은 무한루프로 동작을 하니 이 선언 아래쪽에 있는 코드는 동작을 하지 않는다
rospy.spin()
5. 실행하기
파일은 저장하고 터미널 창에서 다음과 같이 실행해보자
$ roscore
$ python pub.py
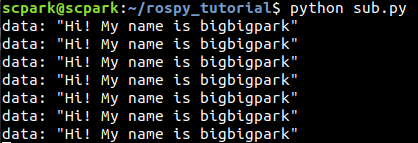
$ python sub.py
6. 결과
성공적으로 수신됨을 확인했다
Leave a comment