
[ROS/Python] 간단한 Publisher
아주 간단한 ros publisher를 만들어보자!
rospy 설명
rospy는 다른 C++로된 패키지와는 달리 CMakeList.txt나 package.xml을 작성하지 않아도 어느 경로에서든 ROS 라이브러리를 include 할 수 있고, 사용할 수 있다
사용하기 전에 환경변수를 설정해주자
bash파일 수정
gedit으로 bash파일을 오픈해준다
$ gedit ~/.bashrc
아래 줄을 적고 저장 후 창을 닫는다
source /opt/ros/melodic/setup.bash
아래 명령어로 수정된 bash파일을 적용해준다
$ source ~/.bashrc
Simple ROS Publisher
1. 폴더 생성
파일을 만들 폴더를 하나 만들고 그 경로로 이동하자
$ mkdir ~/rospy_tutorial
$ cd ~/rospy_tutorial
2. Publisher.py 파일 생성
publisher를 만들기 위하여 아래와 같이 파일을 만들어준다
$ gedit pub.py
3. 전체적인 코드
전체적인 코드를 보고 하나하나 나눠서 보자
In pub.py,
#! /usr/bin/env python
import rospy
from std_msgs.msg import String
rospy.init_node('topic_pub_node')
pub = rospy.Publisher('bigbigpark', String, queue_size=1)
msg = String()
r = rospy.Rate(1)
if __name__ == '__main__':
msg = 'Hi! My name is bigbigpark'
while not rospy.is_shutdown():
pub.publish(msg)
r.sleep()
여기까지만 보고도 코드의 구조가 이해되는 사람은 바로 5번으로 넘어가자
4. 코드 나눠서 보기
저 문장을 셔뱅이라고 부르는데 자세한 설명은 여기를 참조하자
#! /usr/bin/env python
rospy 라이브러리를 불러온다
std_msgs라는 메세지 패키지에서 String이라는 헤더 파일을 불러온다
import rospy
from std_msgs.msg import String
rospy에 관한 코드를 작성하기 전에 제일 먼저 수행되어야하는 init_node이다
이렇게 선언하면 topic_pub_node라는 이름의 노드를 사용하겠다는 뜻이다
rospy.init_node('topic_pub_node')
Publisher를 선언해준다
안에 들어가는 인자는 아래쪽에 나와있는 순서대로 토픽명, 타입, 큐 사이즈 이다
다시 말해서 bigbigpark이라는 이름의 String 타입의 토픽을 publish하겠다는 것이고, 그 때 큐 사이즈는 1로 하겠다는 뜻이다
이 글에서는 queue_size에 대한 자세한 내용은 다루지 않겠다
pub = rospy.Publisher('bigbigpark', String, queue_size=1)
Publisher를 선언했으면 거기 안에 담아줄 메세지를 선언해줘야 한다
이번 예제에서는 String 객체를 이용할 것이기 때문에 아래쪽과 같이 선언해준다
참고로 String 객체에 어떤 정보가 담겨 있느냐는 std_msgs/String Message 여기서도 확인할 수 있고, 터미널 창에서 rosmsg info std_msgs/String 으로도 확인 가능하다
추가로 메세지 발행 주기를 설정할 수 있는데 1 Hz로 설정해준다
msg = String()
r = rospy.Rate(1)
main문은 간단하게 작성을 했고 다음과 같이 동작한다
- msg에 임의의 문자열을 저장
- msg를 publish
- 1 Hz 마다 루프가 동작
rospy.is_shutdown()은 노드 내부에서 예외가 떠서 비정상적으로 종료가 되거나 사용자가 Ctrl+C를 눌러서 종료할 수 있음을 의미한다
if __name__ == '__main__':
msg = 'Hi! My name is bigbigpark'
while not rospy.is_shutdown():
pub.publish(msg)
r.sleep()
5. 실행하기
파일은 저장하고 터미널 창에서 다음과 같이 실행해보자
$ roscore
$ python pub.py
6. 결과
아래 명령어로 현재 발행중인 topic을 볼 수 있다
$ rostopic list
아래쪽과 같이 /bigbigpark이라는 토픽명이 출력된다
/bigbigpark
/rosout
/rosout_agg
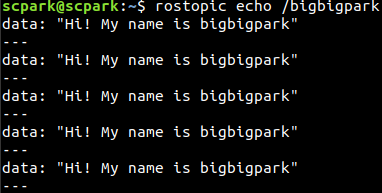
echo명령어로 볼 때도 잘 됨을 확인할 수 있다
$ rostopic echo /bigbigpark
Leave a comment